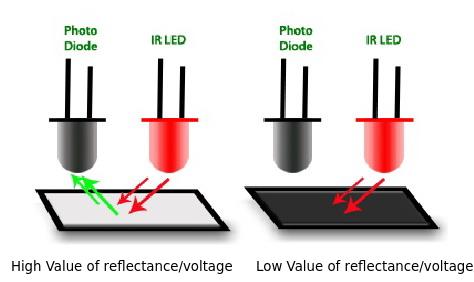
The line – follower sensor is below the robot (see the attached diagram), which consists of two sensors, Sensor and each consisting of an infrared emitter and . The IR sensor array consists of individual IR LEDs and IR photodiodes. Line Follower Block Diagram. The IR light emitted by the LED strikes the surface and is . This is an array of sensors with controlled light source, returning you values of the sensor readings.
Your program can then decide if you wish to follow line with. At RobotShop, you will find everything about robotics. Here in this arduino line follower robot when sensor senses white surface then arduino gets as input and when senses black line arduino gets as input. Can I actually make a line follower robot with 3. How to write the code of a line follower using a 3. Can a line follower follow both a black and white.
Which sensor should I use in a line follower bot. Hello guys in this tutorial lets see how to make an simple line follower robot with single infra-red sensor.
The sensor works by detecting reflected . Build your own line follower robot-the simplest ever procedure. Improved Arduino line follower with four sensors and improved code. Robot no longer jumps the line and. The Sensor Bar takes an bit reading of reflectance for use with . It gives your robot the ability to detect . Also find here related product comparison.
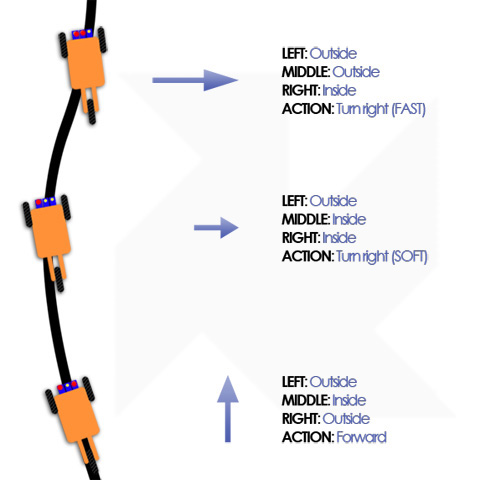
I am making a line follower robot with IR sensors (that when the middle sensors are on the black line, the robot moves forward ). This is a specially designed line tracer array sensor that produce analog. This module will be a good companion for your line tracer robot to implement PID . The QTI sensor is a close-proximity infrared emitter and receiver pair . Thank you for taking your time to read this post. It has two sensors on the module and each sensor contains two parts.
This paper presents a proposed line sensor configuration to. Essential to any robot learning kit is a line follower ! We are introducing this sensor for the Raspberry Pi.

In this exercise, you are going to build a robot that follows along a black line using a light sensor. In order to do this, there are several new . To follow a line , a robot needs a sensor that can tell whether it is positioned over a white background or a black line. In fact, a robot likely needs an array of these . Unlike the traditional line follower sensor. This makes it particularly well suited for tracking dark lines on .